CAN frames
As mentioned in Chapter 2, the CAN bus is the network on which all the solar car's components communicate with one another. Messages sent on this network are called CAN frames.
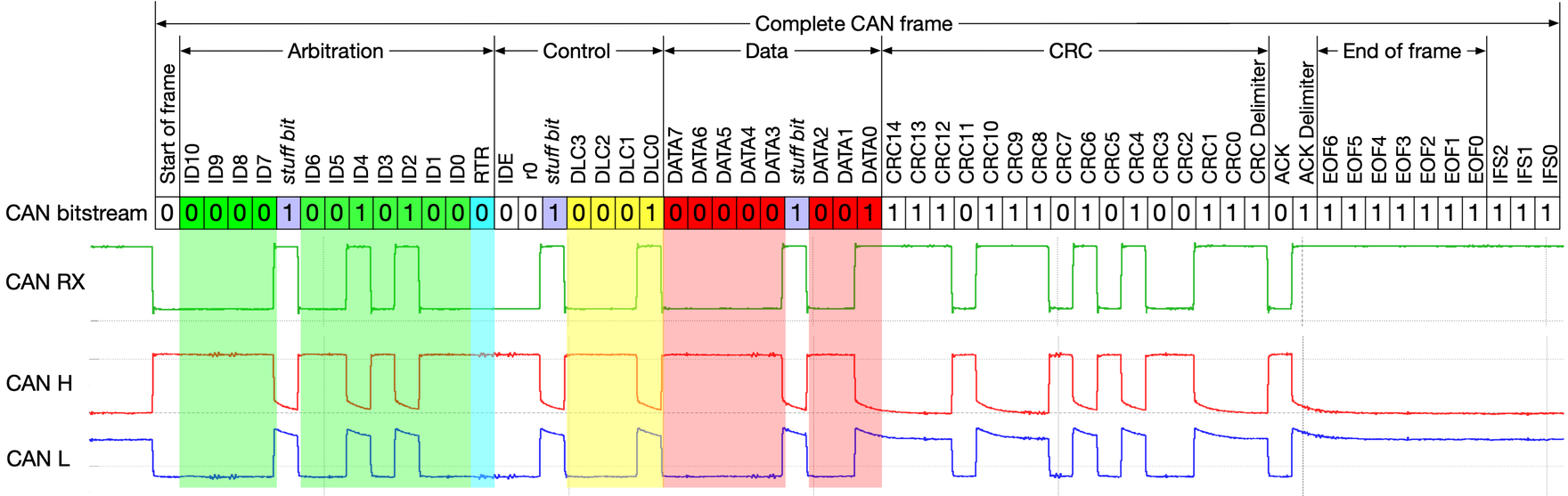
The electrical view of a CAN bus frame

A simplified view of a CAN bus frame
As shown above, many of this bits in a frame are responsible for ensuring reliable and orderly transmission on the line (e.g. the 16 bits for the cyclic redundancy check). These details are largely unimportant for Software. For our purposes, a CAN frame is composed of two parts: the frame ID and the data.
- Frame ID: The frame ID (also called the arbitration ID, message ID, standard identifier, or simply ID) contains 11 bits and is responsible for identifying the sender of the CAN frame and the type of values contained within. For example, on a given CAN network, a frame ID of 0x403 might correspond to velocity measurement message from one motor controller, an ID of 0x413 might correspond to the same message from another motor controller, and an ID of 0x602 might indicate a temperature measurement message from an MPPT.
- Data: Up to 64 bits of a CAN frame contain the actual values of some signal. This is the core of the message.
In the next section you'll learn more about CAN frames as you try your hand at decoding them yourself.